Building a PLC Program That You Can Be Proud – 6
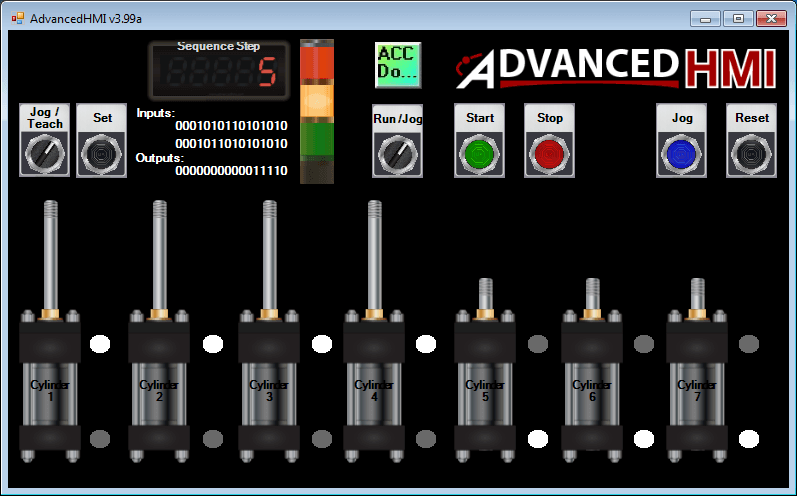
We will continue the series by looking at a sequencer controlling seven cylinders that can be taught. The cylinders can be operator programmed from the AdvancedHMI screen. You will be able to select what cylinders to activate at each step and program in 500 steps. Our PLC will be the Do-More from Automation Direct. Here … Read more