Control 32 PLCs at Once: Master Omron Host Link Protocol
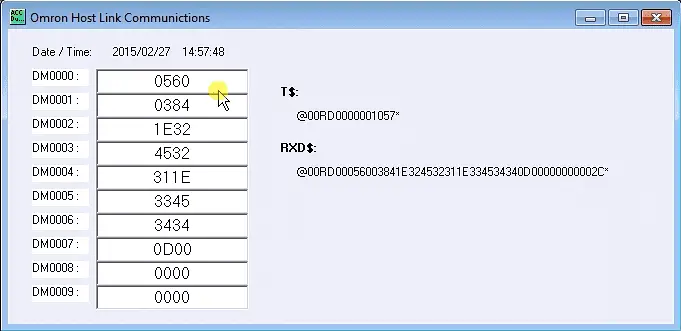
Previously we used VB6 (Visual Basic 6) to implement the Omron Host Link Protocol to communicate to our programmable logic controller. (PLC) In part 2 we used Visual Basic for Applications (VBA) to accomplish our host link serial communication. We will now look at using VB.Net to establish and retrieve information in and out of … Read more