BRX PLC Sequencer: Robot Engine Loader Step-by-Step Guide

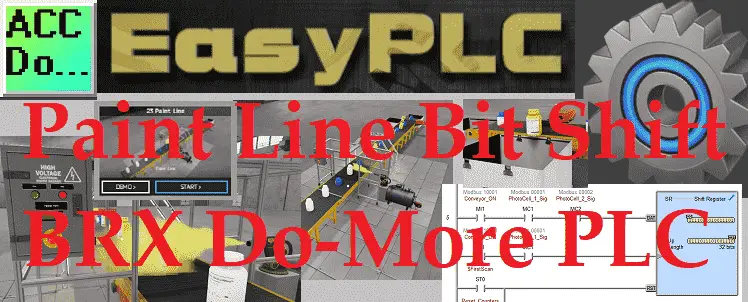
The Machine Simulator (MS) is part of the EasyPLC software suite. It has many built-in machines that are used to show different programming techniques. The robotic cell example is one of these machines. This will demonstrate a sequencer example. In this case, an engine is lifted and placed onto a rack. The logic will step … Read more