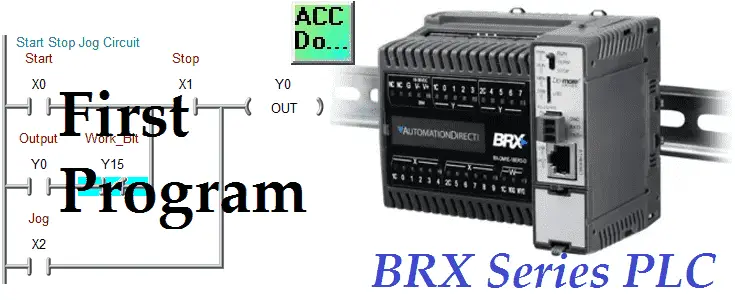
BRX Do-More PLC Monitoring / Testing the Program

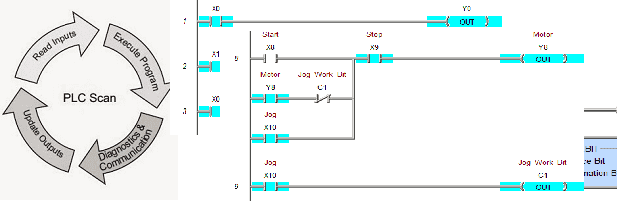
We will now look at monitoring and testing our BRX Do-More program in our controller. Our first program for the BRX Do-More PLC involved a start-stop jog circuit. We will now use the Do-More Designer Software to monitor, test, and modify this program. As a system integrator, this ability can prove very useful to you … Read more